Chapter 1 高斯消元法 {Gaussian elimination}
这篇文章只是尝试把高斯消元法写的更清楚一点。
考虑方程:
\[ A \mathbf{x} = \mathbf{b} \]
\(A \in R^{m \times n}, x \in R^n, b \in R^m\), 考虑A可逆,也就是以上方程只有唯一解。
1.1 数学
这实际上就是我们解矩阵方程组一般使用的方式,比如方程组是:
\[ a_{11}x_1 + a_{12}x_2 + \cdots + a_{1n}x_n = b_1 \\ a_{21}x_1 + a_{22}x_2 + \cdots + a_{2n}x_n = b_2 \\ \cdots \\ a_{m1}x_1 + a_{m2}x_2 + \cdots + a_{mn}x_n = b_m \\ \]
我们一般把它写成增广矩阵:
\[ \begin{bmatrix} a_{11} & a_{12} & \cdots & a_{1n} & b_1 \\ a_{21} & a_{22} & \cdots & a_{2n} & b_2 \\ & \cdots & \\ a_{m1} & a_{m2} & \cdots & a_{mn} & b_m \\ \end{bmatrix} \]
首先化简成阶梯型矩阵的形式:
- \(row_1 / a_{11}\)
- \(row_2 - k * row_1, k = \frac{a_{21}}{a_{11}}\)
- …
这样第一列就化为 \(\begin{bmatrix} 1 \\ \vdots \\ 0 \end{bmatrix}\)
对于第二列我们可以继续类似的操作:
- \(row_2 / (current)a_{22}\)
- \(\cdots\)
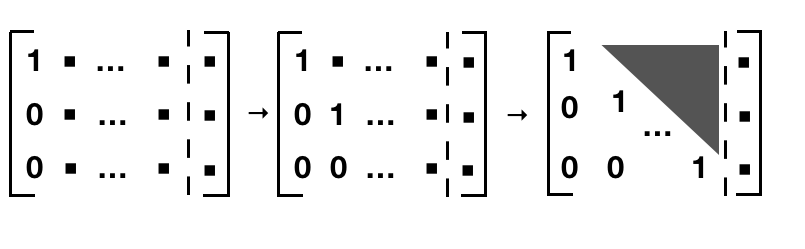
经过这些操作矩阵A变成这样的一个上三角矩阵。 我们可以很容易的得到 \(x_m\) , 再往上回代就可以得到 \(x_1 \cdots x_m\):
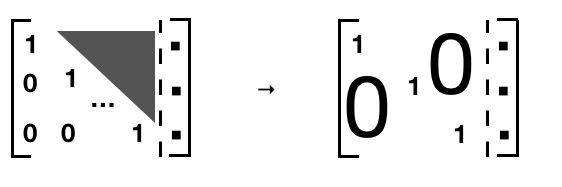
- \(x_m\) get
- \(row_{m-1} - k * row\)
- \(\cdots\)
所以整个过程就只包括两个操作:
- \(row * k\)
- \(row_j + row_i * k\)
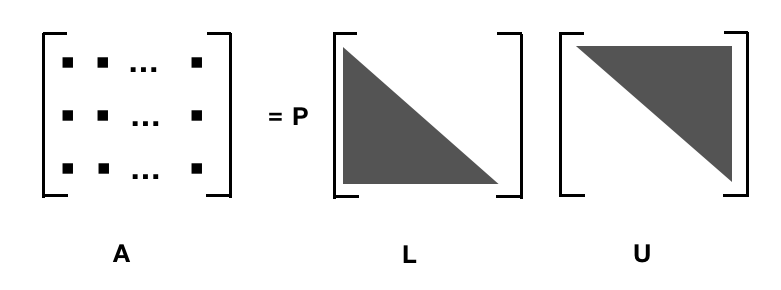
我们也可以用另一种观点来看上述过程,其实也是三步:
- LU decomposition: A = LU ;
- Forward substitution: solve Ly = b ;
- Backward substitution: solve U x = y .
不过我们的前两步比较隐式和同时进行。
实际在计算机中计算,可能会出现的问题:
- \(a_{11}\) 为0,不能除0
- \(a_{11} \ll 1\),除以一个很小很小的数会带来很多问题,比如overflow等
解决的办法就是行交换,把比较大的pivot放在前面。其实这个我们手动解 \(A\mathbf{x} = \mathbf{b}\) 的时候就会这样做,英文叫做 Gaussian elimination with partial pivoting (GEPP).
这里有一个具体的例子 https://web.mit.edu/10.001/Web/Course_Notes/GaussElimPivoting.html
这个英文就暗示了还有别的方法,因为这是 partial pivoting,还有一种 total pivoting,就是不仅仅只考虑行的交换,比如我们为了得到最大的\(a_{11}\), 我们也把列的交换也考虑上。
因为有行交换的原因,所以严格写会是:
\[ A = PLU \]
同样也可以用另一种观点来看这个方法的正确性:
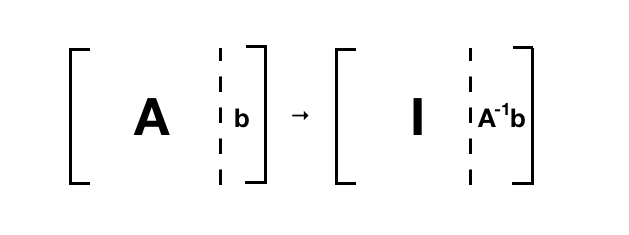
不过我们并没有来算出 \(A^{-1}\)
1.2 计算
实际中,对于不是极其繁琐的有解线性方程组可以直接调库,比如直接用 scipy.linalg.solve 来帮助我们解方程, 一般来说,它会快于我们计算 \(A^{-1}\),然后 \(A^{-1}b\)。
计算
\[ \begin{cases} 2x_1 + 4x_2 - 2x_3 = 2 \\ x_1 - 3x_2 - 3x_3 = -1\\ 4x_1 + 2x_2 + 2x_3 = 3 \end{cases} \]
import numpy as np
from scipy import linalg
a = np.array([[2 ,4 ,-2],
[1, -3, -3],
[4, 2, 2,]])
b = np.array([2, -1, 3])
x = linalg.solve(a, b)
np.dot(a, x) # array([ 2., -1., 3.])
x # array([0.5 , 0.33333333, 0.16666667])array([0.5 , 0.33333333, 0.16666667])我们的解答还是很接近数值解的:
\[ \begin{cases} x_1 = 1/2 \\ x_2 = 1/3\\ x_3 = 1/6 \end{cases} \]
更多操作,比如 lu 分解可以查看文档 scipy.linalg.lu