Chapter 7 矩阵分解 {matirx application}
总结一下之前我们碰到的矩阵的各种分解方式,在开始之前先补充一些定义。
7.1 定义
7.1.1 共轭转置 Conjugate transpose
如果我们有一个复数矩阵A:
\[ {\displaystyle {\boldsymbol {A}}={\begin{bmatrix}1&-2-i&5\\1+i&i&4-2i\end{bmatrix}}} \]
它的转置\(A^T\):
\[{\displaystyle {\boldsymbol {A}}^{\mathrm {T} }={\begin{bmatrix}1&1+i\\-2-i&i\\5&4-2i\end{bmatrix}}}\]
共轭转置\(\overline{A^T}\):
\[{\displaystyle \overline{{\boldsymbol {{A}}}^{\mathrm {T}} }={\begin{bmatrix}1&1-i\\-2+i&-i\\5&4+2i\end{bmatrix}}}\]
共轭转置也经常记为: \(A^*, A^H(这个写法跟下面的 Hermitian 定义有关), \overline{A^T}\)
7.1.2 Hermitian
Hermitian matrix 埃尔米特矩阵: 埃尔米特矩阵中每一个第i行第j列的元素都与第j行第i列的元素的复共轭。 也就是这个矩阵等于它的共轭转置。
复数我们知道 \(z = a + ib \in \mathbb{C}\), 共轭我们也清楚 \(\bar{z} = a - ib\)
\[ {\displaystyle A{\text{ Hermitian}}\quad \iff \quad a_{ij}={\overline {a_{ji}}}} \\ {\displaystyle A{\text{ Hermitian}}\quad \iff \quad A=A^{\mathsf {H}}} \]
如果 \(A \in \mathbb{R}^{n \times n}\) 是实数矩阵,并且是 Hermitian, 那么 \(a_{ij} = a_{ji}\), 这就是一个对称矩阵。一般来说,实对称矩阵我们一般就说它是实对称矩阵,不过我们知道,它也是 Hermitian。
如果我们有一个复数矩阵A,那么它需要等于它的共轭转置, 比如:
\[ {\displaystyle A = {\begin{bmatrix}2&2+i&4\\2-i&3&i\\4&-i&1\\\end{bmatrix}}} \]
其实 Hermitian 也暗示了我们这个矩阵需要是方阵,至少我们转置之后的维度要跟原来的相等嘛。
7.1.3 正定 positive definite
一个 n × n 的实对称矩阵 M 是正定的,当且仅当对于所有的非零实系数向量z,都有 \(z^TMz > 0\) 。其中 \(z^T\) 表示 z 的转置。
\[ {\displaystyle M{\text{ positive definite}}\quad \iff \quad x^{\textsf {T}}Mx>0{\text{ for all }}x\in \mathbb {R} ^{n}\setminus \mathbf {0} } \]
首先 实对称矩阵 M 并不一定正定的, 比如 M = -I :
\[ \begin{bmatrix}1 & 0 & 1\end{bmatrix}\begin{bmatrix}-1 & 0 & 0 \\ 0 & -1 & 0 \\ 0 & 0 & -1 \end{bmatrix}\begin{bmatrix}1 \\ 0 \\ 1\end{bmatrix} = -2 < 0 \]
对于复数,一个 n×n 的埃尔米特矩阵 M是正定的当且仅当对于每个非零的复向量z,都有\(z^*Mz > 0\)。其中z*表示z的共轭转置。由于 M是埃尔米特矩阵,经计算可知,对于任意的复向量z,\(z^*Mz\)必然是实数,从而可以与0比较大小。因此这个定义是自洽的。
\[{\displaystyle M{\text{ positive definite}}\quad \iff \quad x^{*}Mx>0{\text{ for all }}x\in \mathbb {C} ^{n}\setminus \mathbf {0} } \]
Hermitian 也当然不一定正定,我们可以有一些判定方法:
- 矩阵M的所有的特征值 \(\lambda_i\) 都是正的
- …
7.1.4 正交矩阵 orthogonal matrix
\[Q^{T}=Q^{-1}\Leftrightarrow Q^{T}Q=QQ^{T}=I.\,\!\]
\[{\displaystyle 1=det(I)=det(Q^{T}Q)=det(Q^{T})det(Q)=(det(Q))^{2}\Rightarrow det(Q)=\pm 1}\]
- 作为一个线性映射(变换矩阵),正交矩阵保持距离不变,所以它是一个保距映射,具体例子为旋转与镜射。
- 行列式值为+1的正交矩阵,称为特殊正交矩阵(special orthogonal group),它是一个旋转矩阵。
- 行列式值为-1的正交矩阵,称为瑕旋转矩阵。瑕旋转是旋转加上镜射。镜射也是一种瑕旋转。
- 所有 n × n 的正交矩阵形成一个群 O(n),称为正交群。亦即,正交矩阵与正交矩阵的乘积也是一个正交矩阵。
- 所有特殊正交矩阵形成一个子群SO(n),称为特殊正交群。亦即,旋转矩阵与旋转矩阵的乘积也是一个旋转矩阵。
7.1.5 酉矩阵 unitary matrix
酉矩阵/幺正矩阵:
\[{\displaystyle U^{*}U=UU^{*}=I_{n}}\]
就是 U 和其 共轭转置 \(U^*\) 乘积为 单位矩阵。它是 正交矩阵 在复数上的推广。
酉(汉语拼音:yǒu)为地支的第十位,其前为申、其后为戌。酉月为农历八月,酉时为二十四小时制的17:00至19:00,在方向上指正西方。五行里酉代表金,阴阳学说里酉为阴。
说实话,这个字之前还没注意过它怎么念。unitary 作为 unit 的形容词,单位的、一元的,鉴于单位矩阵这个已经被 take 了,被翻成 幺正矩阵 也和不错,也大概有一元那么个意思。翻成酉矩阵大概也是文化人才能做到吧。
酉矩阵有很多很好的性质:
- \({\displaystyle U^{-1}=U^{*}}\), 酉矩阵必定可逆,且逆矩阵等于其共轭转置:
- \(|\lambda_n| = 1\), 酉矩阵 U 的所有特征值 \(λ_n\) ,其绝对值都是等于 1 的复数:
- \({\displaystyle \left|\det(U)\right|=1}\), 酉矩阵 U 行列式的绝对值也是 1
- \({\displaystyle (U\vec {x} )\cdot (U\vec {y} )=\vec {x} \cdot \vec {y} }\), 酉矩阵 U 不会改变两个复向量 \(\vec{x}\) 和 \(\vec{y}\) 的点积
- …
7.1.6 正规矩阵 normal matrix
正规矩阵(英语:normal matrix)A 是与自己的共轭转置满足交换律的复系数方块矩阵,也就是说,A 满足 \[\mathbf{A}^* \mathbf{A} = \mathbf{A} \mathbf{A}^*\]
\(A^*\) 是 A 的共轭转置。
如果 A是实系数矩阵,则 \(A^* = A^T\),从而条件简化为 \(AA^T = A^TA\).
正规矩阵的概念十分重要,因为它们正是能使谱定理成立的对象:矩阵 A 正规当且仅当它可以被成 \(A = U \Lambda U^*\) 的形式。其中的\(\Lambda = diag(\lambda_1, \lambda_2, \dots)\)为对角矩阵,U 为酉矩阵。
总而言之,就是 正规矩阵 一定可以 特征分解/频谱分解/谱定理。
7.1.7 类比
不同种类的正规矩阵可以与各种复数建立对应的类比关系。比如:
- 可逆矩阵类似于非零的复数。
- 矩阵的共轭转置类似于复数的共轭
- 酉矩阵类似于模等于1的复数。
- 埃尔米特矩阵类似于实数。
- 埃尔米特矩阵中的正定矩阵类似于正实数。
7.2 分解
7.2.1 A = PLU
- 适用:方阵
- 分解: A = PLU, L 是 下三角阵, U 是 上三角阵,而 P 则是 permutation 行变换,单位矩阵变换可得, 如果没有行变换,A 就 直接分解成 LU. PLU 分解源自高斯消元法。
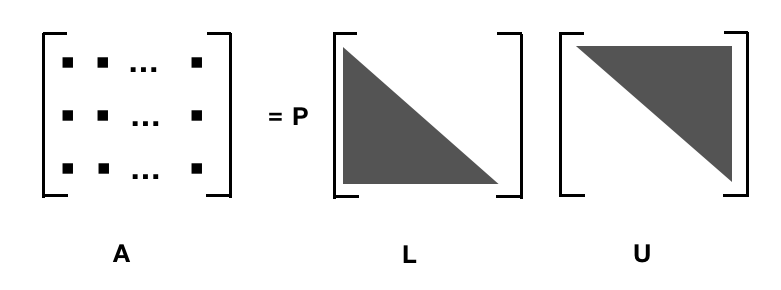
所有的方阵都可以写成 PLU 分解的形式。
7.2.2 Cholesky 分解
- 适用:方阵、hermitian、正定 positive definite
- 分解: \(A = LL^*\)
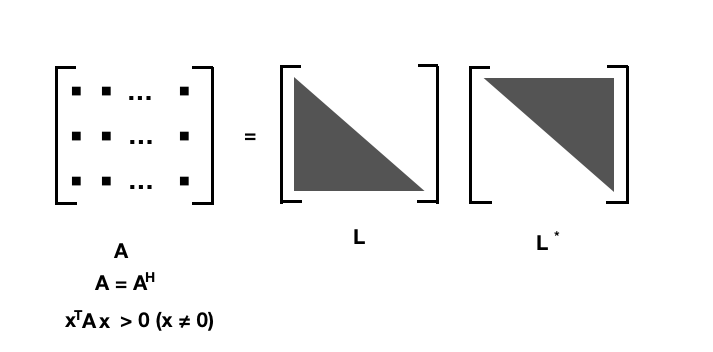
A 是正定的 Hermitian阵, L 是下三角矩阵, \(L^*\) 是 L 的共轭转置, 是一个上三角.
7.2.3 QR分解
- 适用于: 列向量线性无关的矩阵 m x n, m ≥ n
- 分解:A = QR, Q 是 m x m 的 酉矩阵, 又叫做幺正矩阵(unitary matrix), R 是一个上三角矩阵
对于方阵的 QR 分解我比较熟悉
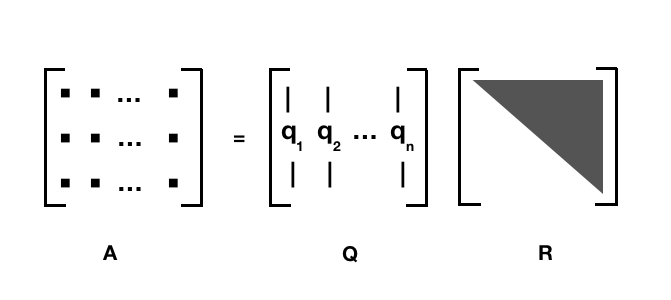
如果A不是方阵的话,那么三角矩阵只会占据一部分,下面会都是0, 所以经常也这样写 QR 分解:
\[{\displaystyle A=QR=Q{\begin{bmatrix}R_{1}\\0\end{bmatrix}}={\begin{bmatrix}Q_{1},Q_{2}\end{bmatrix}}{\begin{bmatrix}R_{1}\\0\end{bmatrix}}=Q_{1}R_{1}}\]
where R1 is an n×n upper triangular matrix, 0 is an (m − n)×n zero matrix, Q1 is m×n, Q2 is m×(m − n), and Q1 and Q2 both have orthogonal columns.
计算 QR 分解 我们可以用 Gram–Schmidt 或者 Householder reflections.
7.2.4 特征分解/频谱分解 Eigendecomposition / spectral decomposition
- 适用于: 具有线性独立特征向量(不一定是不同特征值)的方阵 A
- 分解:\(\mathbf{A}=\mathbf{Q}\mathbf{\Lambda}\mathbf{Q}^{-1}\)
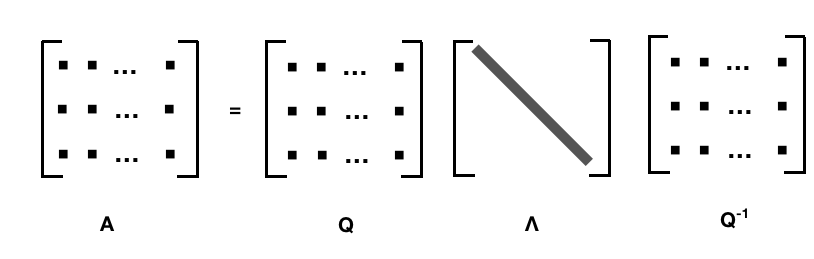
Q 是 n x n 的矩阵, 第 i 列是 A 的 特征向量 \(\vec{q}_i\), \(\Lambda\) 是对角阵,其中第 i个 对角元素\(\Lambda_{ii} = \lambda_i\), 是跟 特征向量 \(\vec{q}_i\) 对应的 特征值 \(\lambda_i\). 这里需要注意只有可对角化矩阵才可以作特征分解。比如\({\displaystyle {\begin{bmatrix}1&1\\0&1\\\end{bmatrix}}}\) 不能被对角化,也就不能特征分解。
一般来说,特征向量 \(\vec{q}_i, ( i = 1, \cdots, N)\) 一般被单位化(但这不是必须的)。未被单位化的特征向量组 \(\vec{q}_i, ( i = 1, \cdots, N)\) 也可以作为 Q 的列向量。这一事实可以这样理解: Q 中向量的长度都被 \(Q^{-1}\) 抵消了。
这里我们虽然用了 Q 这个字母,但是我们并没有说它是一个正交阵,因为之前写特征分解的时候也提到过:
对于任意矩阵,其对应于不同特征值的特征向量线性无关,但不一定正交,而对于实对称矩阵,其对应于不同特征值的特征向量是相互正交的。
特征分解很容易推导:
\[ {\displaystyle {\begin{aligned}\mathbf {A} \mathbf {v} &=\lambda \mathbf {v} \\\mathbf {A} \mathbf {Q} &=\mathbf {Q} \mathbf {\Lambda } \\\mathbf {A} &=\mathbf {Q} \mathbf {\Lambda } \mathbf {Q} ^{-1}.\end{aligned}}} \]
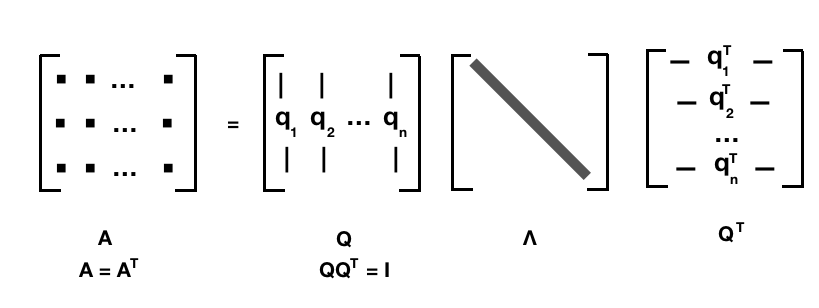
- 实对称矩阵
对于任意的 n x n 实对称矩阵都有 n 个线性无关的特征向量,并且这些特征向量都可以正交单位化而得到一组正交且模为 1 的向量。所以:
\[\mathbf{A}=\mathbf{Q}\mathbf{\Lambda}\mathbf{Q}^{T} \]
其中 Q 为正交矩阵, \(\Lambda\) 为对角矩阵。
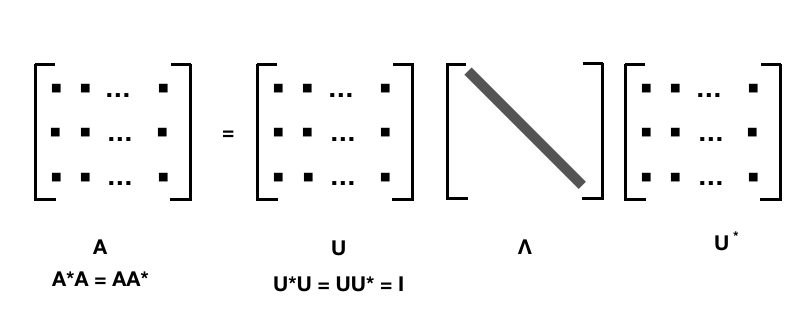
- 正规矩阵
一个复正规矩阵具有一组正交特征向量基,故正规矩阵可以被分解成 \[\mathbf{A}=\mathbf{U}\mathbf{\Lambda}\mathbf{U}^{*} \]
其中 U 是 酉矩阵。
特征分解对于理解线性常微分方程或线性差分方程组的解很有用。 例如,差分方程 \(x_{t+1} = A x_t\) 从初始条件开始 \(x_0 = c\) 到 \(x_{t}=A^{t}c\) ,相当于 $x_{t}=VD{t}V{{-1}}c $,其中V和D是由A的特征向量和特征值形成的矩阵。 由于D是对角线,D 的 t 次幂 $ D^{t}$ 只是涉及将对角线上的每个元素的 t 次幂 。 这与 A 的 t的次幂相比 ,更容易实现和理解,因为A通常不是对角线。
这里就直接点出了一个 特征分解的应用场景。 解 线性常微分方程 或 线性差分方程组。
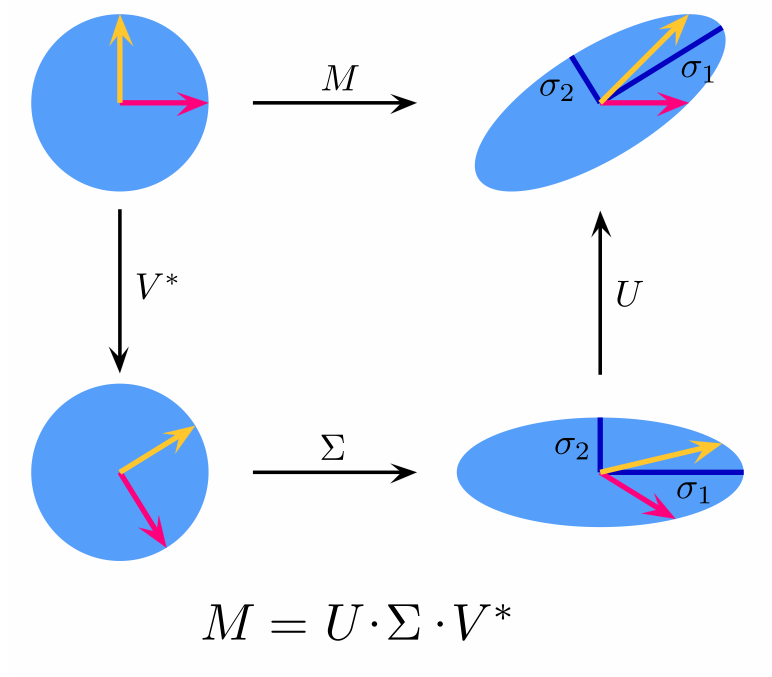
7.2.5 奇异值分解
- 适用于: m x n 矩阵A
- 分解: \(A=U \Sigma V^*\), U 和 V 都是 酉矩阵/幺正矩阵, 也就是满足 \(U^*U= V^*V = I\), \(\Sigma\) 是对角阵,对角上的元素称为A的奇异值 ,
- U 和 V 并不一定是唯一的。
至此,线性/矩阵相关暂时告一段落。
Matlab/numpy 都内置了这些分解方式,而对我们来说,重要的是在合适的场景中选择合适的工具来解决问题。
参考: 大量参考 wikipedia