Chapter 6 奇异值分解的应用 {SVD application}
这里再写一些 SVD 更为具体的应用。
6.1 Rigid Alignment / Procrustes Problem
顾名思义, 比如我们想要这两个形状对齐:
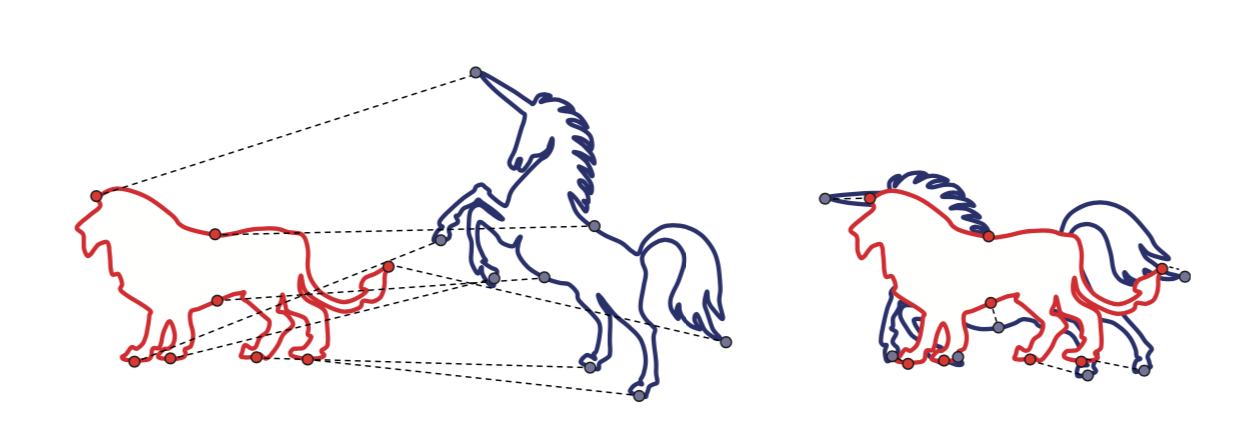
或者比如我们有两个点云,想让它们尽量对齐:
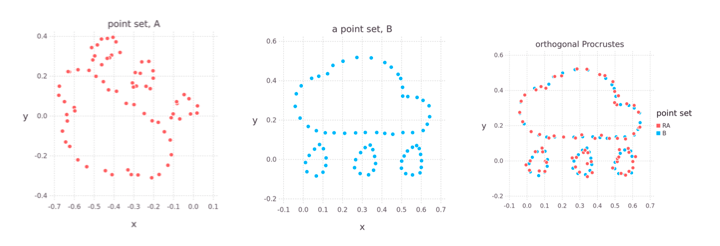
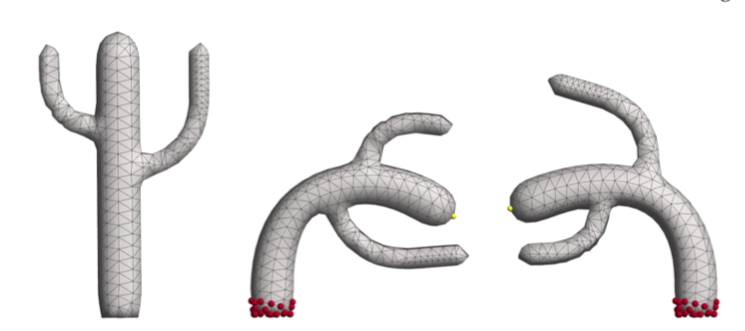
又或者我们3D扫描了一些点云,想要把它们对齐以生成更好的3D point clouds,最终生成更好的 3D mesh,也要用到 Rigid Alignment.
最简单的set up 就是我们有如上图的两个点云, 然后通过平移和旋转,最小化它们之间的距离:
\[ E = \sum_{i=1}^n \parallel p_i-(Rq_i+ t) \parallel^2 \\ p_i \in P \\ q_i \in Q \]
平移很容易求到, 让它们的质心重合:
\[ p = \frac{1}{n}\sum_{i=1}^np_i = \frac{1}{n}\sum_{i=1}^n (Rq_i+t) = R \frac{1}{n}\sum_{i=1}^nq_i + t = Rq + t \\ t = p - Rq \]
质心重合之后我们就只需要最小化对应点之间的距离:
\[ \begin{aligned} \sum_{i=1}^n \parallel p_i-(Rq_i+t) \parallel^2 &= \sum_{i=1}^n \parallel p_i - Rq_i - (p - Rq) \parallel^2 \\ &= \sum_{i=1}^n \parallel (p_i -p) - R(q_i -q) \parallel^2 \end{aligned} \]
\(p_i - p\) 和 \(q_i - q\) 其实是以质心为坐标来表示 p 和 q, 为了简便,令 \(x_i = p_i - p, y_i = q_i - q\), 上式化简:
\[ \begin{aligned} \parallel x_i - Ry_i \parallel ^2 &= (x_i - Ry_i)^T(x_i-Ry_i) \\ &= (x_i^T - y_i^TR^T)(x_i-Ry_i) \\ &= (x_i^Tx_i - x_i^TRy_i - y_i^TR^Tx_i + y_i^TR^TRy_i) & (R^TR = I)\\ &= (x_i^Tx_i + y_i^Ty_i - x_i^TRy_i - y_i^TR^Tx_i) \end{aligned} \]
\(x_i^TRy_i\) 是一个标量,因为 \(x_i^T\) 是 1xd, R 是 dxd, \(y_i\) 是 dx1,然后对于任何标量,我们有 \(a^T = a\), 所以:
\[ x_i^TRy_i = (x_i^TRy_i)^T = y_i^TRx_i \]
继续化简:
\[ \sum_{i=1}^n \parallel x_i - Ry_i \parallel^2 =\sum_{i=1}^n ( x_i^Tx_i + y_i^Ty_i - 2y_i^TRx_i ) \]
上面这个式子中 \(x_i^Tx_i、y_i^Ty_i\) 是固定的, 变换的就是 \(\sum_{i=1}^n y_i^TRx_i\)
这里为了方便,我们直接这样来看待:
\[ \sum_{i=1}^n \parallel x_i - Ry_i \parallel^2 = \parallel X - RY \parallel_{Fro}^2 = const - 2tr(Y^T R X) \]
这里我们用了一些结论:
- $ tr(A + B) = tr(A) + tr(B)$
- $ tr(A^T) = tr(A)$
- \(\parallel A \parallel_{Fro}^2 = \sum_{i,j} | a_{ij}|^2\)
- \(tr(AB) = tr(BA)\)
\(tr(A + B) = tr(A) + tr(B)\) 和 $ tr(A^T) = tr(A)$ 都肉眼可见的为真。
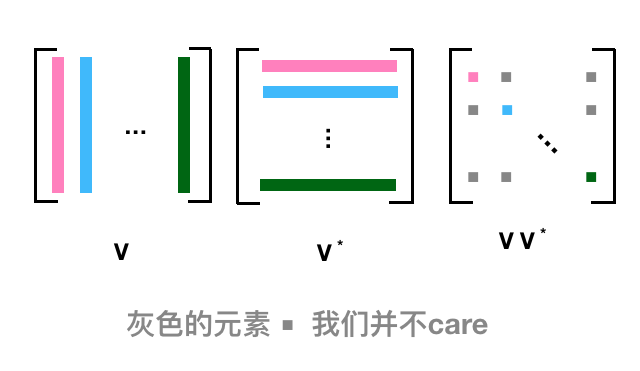
对于 Frobenius norm, 因为是矩阵中每个元素的模加起来,正好 AA* 对角线上的元素的和, 下面这个图会比较清晰,比如第一列,对应于共轭转置的第一行,正好是 \(AA^*\) 对角元素第一个,而我们不 care 除了对角线上的别的元素,所以容易证其正确性:
至于 \(tr(AB) = tr(BA)\) 也是可以跟上面一样的看法 \(Tr(AB) = Tr (BA) = \sum a_{ij} b_{ji}\), 这个结论也可以推广:
- \({\displaystyle \operatorname {tr} (\mathbf {A} \mathbf {B} \mathbf {C} )=\operatorname {tr} \left(\left(\mathbf {A} \mathbf {B} \mathbf {C} \right)^{\mathsf {T}}\right)=\operatorname {tr} (\mathbf {C} \mathbf {B} \mathbf {A} )=\operatorname {tr} (\mathbf {A} \mathbf {C} \mathbf {B} ),}\)
- \({\displaystyle \operatorname {tr} (\mathbf {A} \mathbf {B} \mathbf {C} \mathbf {D} )=\operatorname {tr} (\mathbf {B} \mathbf {C} \mathbf {D} \mathbf {A} )=\operatorname {tr} (\mathbf {C} \mathbf {D} \mathbf {A} \mathbf {B} )=\operatorname {tr} (\mathbf {D} \mathbf {A} \mathbf {B} \mathbf {C} )}\) , ABCD 呈循环状
最小化 \(-2tr(Y^T R X)\) 也就是最大化 \(tr(Y^T R X)\)
\[ \begin{aligned} tr(Y^TRX) {} &= tr(RXY^T) & tr(AB) = tr(BA) \\ &= tr(R U \Sigma V^T) & XY^T = U \Sigma V^T \\ &= tr(\Sigma V^T R U ) & tr(AB) = tr(BA) \\ &= tr(\Sigma M) & M = V^TRU, \text{also orthogonal} \\ &= \sum_i \sigma_im_{ii} & \Sigma \text{ is diagonal} \end{aligned} \]
\(M = V^TRU\) 正交矩阵的乘积依旧正交,很好证明:
\[ AA^T = A^TA = I \\ BB^T = B^TB = I \\ (AB)^T(AB) = B^TA^TAB = B^TB = I \]
更一般,上面这个 \(M = V^TRU\) = \(V^T (RU)\), 所以当然也是正交矩阵。
最后这里是这样的:
\[ tr(\Sigma M) = \begin{bmatrix} \sigma_1 & & & & \\ & \sigma_2 & & \\ & & & \ddots & \\ & & & & \sigma_n\end{bmatrix} \begin{bmatrix} m_{11} & m_{12} & \dots & m_{1d} \\ m_{21} & m_{22} & \dots & m_{2d} \\ \vdots & \vdots & \vdots & \vdots \\ m_{d1} & m_{d2} & \dots & m_{dd} \end{bmatrix} = \sum_{i=1}^d\sigma_im_{ii} \le \sum_{i=1}^d \sigma_i \]
M 作为正交阵,满足:
\[ 1 = m_j^Tm_j = \sum_{i=1}^d m_{ij}^2 \implies m_{ij}^2 \le 1 \implies |m_{ij}| \le 1 \]
M 是正交阵, 所以 \(m_ii \le 1\), 奇异值分解,所以 \(\sigma_i \ge 0\), 所以我们会想要尝试去 M 对角线上的最大值,也就是当 M = I 的时候,代入回去可以知道:
\[ I = M = V^TRU \implies V = RU \implies R = VU^T \]
这个问题又被称为:Procrustes Problem
普洛克路斯忒斯(希腊语:Προκρούστης)也称达玛斯蒂斯(希腊语:Δαμαστής)是希腊神话中的一名强盗。他是海神波塞冬的儿子,在从雅典到埃莱夫西纳的路上开设黑店,拦截行人。店内设有一张铁床,旅客投宿时,将身高者截断,身矮者则强行拉长,使与床的长短相等。而由于普洛克路斯忒斯秘密地拥有两张长度不同的床,所以无人能因身高恰好与床相等而幸免。后来英雄忒修斯前往雅典时,路过此地,将其杀死。

这个问题的叫法和来源有点意思嘛。
最小化 \(\parallel X - RY \parallel ^2\) 的正交矩阵 R 满足: \(R = VU^T\), 其中 \(XY^T = U \Sigma V^T\)
具体求解我们一般可能是这么来操作的:
- 固定 R, 针对 t 最小化 E
- 固定 t, 针对 R 最小化 E (R 需要满足 \(R^TR = I\))
- 再回到第一步
这样直到收敛。
6.2 APAR
有一篇著名的 paper, As-Rigid-As-Possible Surface Modeling,用的就是 key idea 就是对齐、 SVD 分解 以及上面的迭代求解。
6.3 PCA
PCA 之前也写过,包括特别具体的步骤:
- 算出质心 : \(m = \frac{1}{n} \sum_{i=1}^n x_i\)
- 去中心化: \(y_i = x_i - m\)
- 散布/协方差矩阵 : \(S = YY^T\) 其中 Y 的列为 \(y_i\)
- 特征分解 : \(S = V \Lambda V^T\)
- 特征值排序 : \(\lambda_1 \ge \lambda_2 \ge \cdots \ge \lambda_d\)
- 特征向量排序 : \(v_1, \cdots, v_d\)
- 取出我们需要的部分
6.4 图像压缩
还记的之前的文章奇异值分解中写到了 Eckart-Yound Theorem(低维矩阵近似):
我们想找到一个找到一个 rank 为 r 的矩阵 \(\tilde{A}\) 来近似 A, 做法就是将 A 进行 SVD 分解, \(A = U \Sigma V^T\) , 然后我们取其中前 r 个 最大的奇异值,重组 \(\tilde{A} = U \Sigma_r V^T\) , 这样的重组会使得 \(\parallel \tilde{A} - A \parallel_{Fro}\) 最小化。
\[ \Sigma_r = \begin{bmatrix} \sigma_1 & & & & \\ & \ddots & & \\ & & \sigma_r & & \\ & & & 0 & \\ & & & & \ddots \\ & & & & & 0 \end{bmatrix} \]
这里我们来看一个具体的例子,假设我先读入一幅图片,这幅图片是 RGBA 的,矩阵的维度是 m x n x 4, 这样处理的话有点麻烦,我先把它转成灰色的, 这样矩阵就是 m x n, 处理起来比较简单。 (m x n x 4 应该也可以通过类似的方法来处理)。
对灰色的图像,我们做 SVD 分解,然后我们再抽出 前10个、前20个、前50个 最大的奇异值来重新组成图片,看结果:
import numpy as np
import matplotlib.pyplot as plt
import matplotlib.image as mpimg
def rgb2gray(rgb):
return np.dot(rgb[...,:3], [0.299, 0.587, 0.144])
img = mpimg.imread('Mona_Lisa.png')
gray = rgb2gray(img)
plt.imshow(gray, cmap = plt.get_cmap('gray'))
U, s, Vh = np.linalg.svd(gray)
def composite(U, s, Vh, n):
return np.dot(U[:, :n], np.dot(np.diag(s[:n]), Vh[:n,:]))
for i in [10, 20, 50]:
new_img = composite(U, s, Vh, i)
plt.imshow(new_img, cmap='gray')
title = "new_img_%s" % i
plt.title(title)
plt.savefig(title + '.png')
plt.show()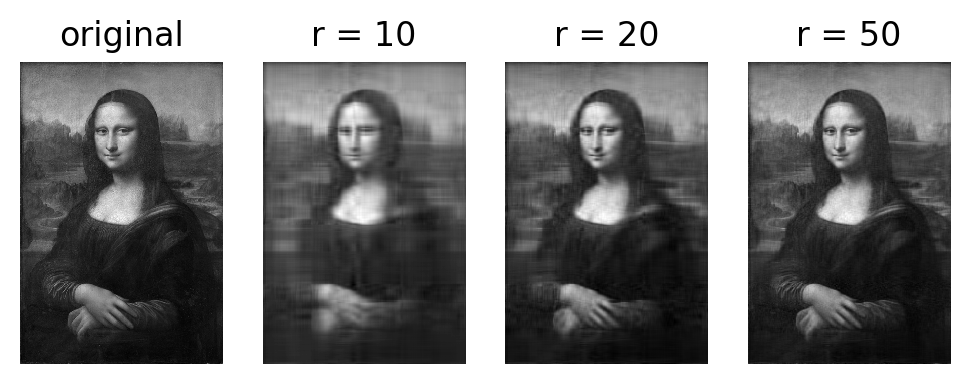
有点意思。
我觉得一种更 简单/感性 的理解方式是:
对称阵特征向量分解的基础是谱分析,而奇异值分解则是谱分析理论在任意矩阵上的推广。
就是把这个看成一种分解、然后近似重建的方式,可以说类似 傅里叶分析,我们可以取一定的频率来重建原本的信号。
或者更感性的理解可以是这样,比如我们有空间的任意一个\((x, y, z)^T\)向量,如果我们只想要xy平面上的向量来模拟它,当然取 \((x, y)^T\) ,降低了维度,但是我们还是想尽量在靠近这个向量。
或者又像那么多我们学过的展开,比如一个多项式:
\[f(x) = a_n x^n + a_{n-1} x^{n-a} + \cdots + a_1 x + a_0\]
我们可以取 \(a_n \cdots, a_r\) 来模拟这个 \(f(x)\) ,虽然不是全等,但已经足够靠近。o(╯□╰)o